You shipped the "find similar items" feature on a Friday. The eval set was balanced — 1,000 known positives, 1,000 known negatives — and your CLIP cosine threshold of 0.964 hit precision 0.95 at recall 0.99. By Monday, your dashboard showed precision near 0.30. Nothing in your code had changed.
Production is not 50/50. The real positive rate for "find me a near-duplicate of this asset" is closer to 5 in 100. The threshold you tuned at 50/50 was not wrong; it just answered the wrong question. With nineteen times as many negatives as positives, even a 99.5%-specific classifier drowns the positives in false alarms.
This post walks through how to pick — and re-pick — a similarity threshold when nobody hands you labels, using ModelNet40 as the public stand-in for "your asset catalog." Three things matter and most retrieval tutorials skip them: where the calibration set comes from, what L2-normalisation does to the threshold, and what the positive base rate does to everything.
The fastest way to get a "labeled" pair set without humans is to make the labels. For every mesh in ModelNet40, you render it from 8 horizontal-ring views; then you rotate it 25° about y and render it again from the same 8 views. The original and its rotated twin are a pseudo-positive pair. Two different objects sampled across classes are a negative pair.
def perturb_mesh(mesh):
tm = mesh.as_trimesh()
R = trimesh.transformations.rotation_matrix(
np.deg2rad(25.0), [0, 1, 0], tm.centroid)
tm2 = tm.copy()
tm2.apply_transform(R)
return Mesh(vertices=tm2.vertices, faces=tm2.faces)
I built 640 objects across 8 ModelNet40 classes (airplane, chair, table, bed, bookshelf, bench, sofa, lamp), 80 per class. That gives 640 positive pairs (each object paired with its twin) and 640 random cross-class negative pairs — a balanced 50/50 calibration set, 1,280 pairs total. Manifest is at data/pair-manifest.csv.
There is a bias to call out before any number from this set is trusted in production. Your rotated-twin pairs are easier than real near-duplicates. The twin is the identical mesh viewed from a 25°-shifted camera, so the visual encoder sees almost the same silhouette — only the parts shadowed in one view and lit in the other actually differ. Real near-duplicates in the wild are reuploaded with different lighting, scaled differently, mesh-decimated, or rebuilt from scratch by someone copying the design. A threshold tuned on rotation-only perturbations will be optimistic by 5-10 points of recall. We will see how much later, when the hard negatives bite. But it is the right starting point because nothing else exists and it is cheap to refresh as your perturbation model gets nastier — add decimation, then texture-swap, then partial-occlusion as you measure what your encoder actually fails on.
Three encoders are in the bakeoff, picked because they sit at different points on the geometry/appearance axis and they all drop into a search engine cleanly. CLIP ViT-B/32, mean-pooled across the 8 views per object, gives 512-D vectors. DINOv2 ViT-B/14 on the same 8 views gives 768-D. A PointNet-proxy — the shared kit's deterministic geometric stand-in (PCA eigenvalues + normal-angle histogram from sampled mesh points) — gives 19-D. The stand-in is deterministic; the API is stable so a real PointNet++ checkpoint can swap in later.
For each pair I compute three similarity scores: cosine on the embeddings, L2 distance on the raw vectors (no normalisation), and L2 distance after L2-normalising each vector to unit length.
%%{init: {'theme': 'neutral'}}%%
flowchart LR
M[ModelNet40 meshes] --> P[apply perturbation]
P --> R[render 8 views]
R --> E[encode CLIP / DINOv2 / PointNet]
E --> N[L2-normalise]
N --> PR[build pos/neg pairs]
PR --> S[sweep thresholds]
S --> C[choose at precision target]
C --> B[re-test on base-rate-shifted set]
B -.-> S

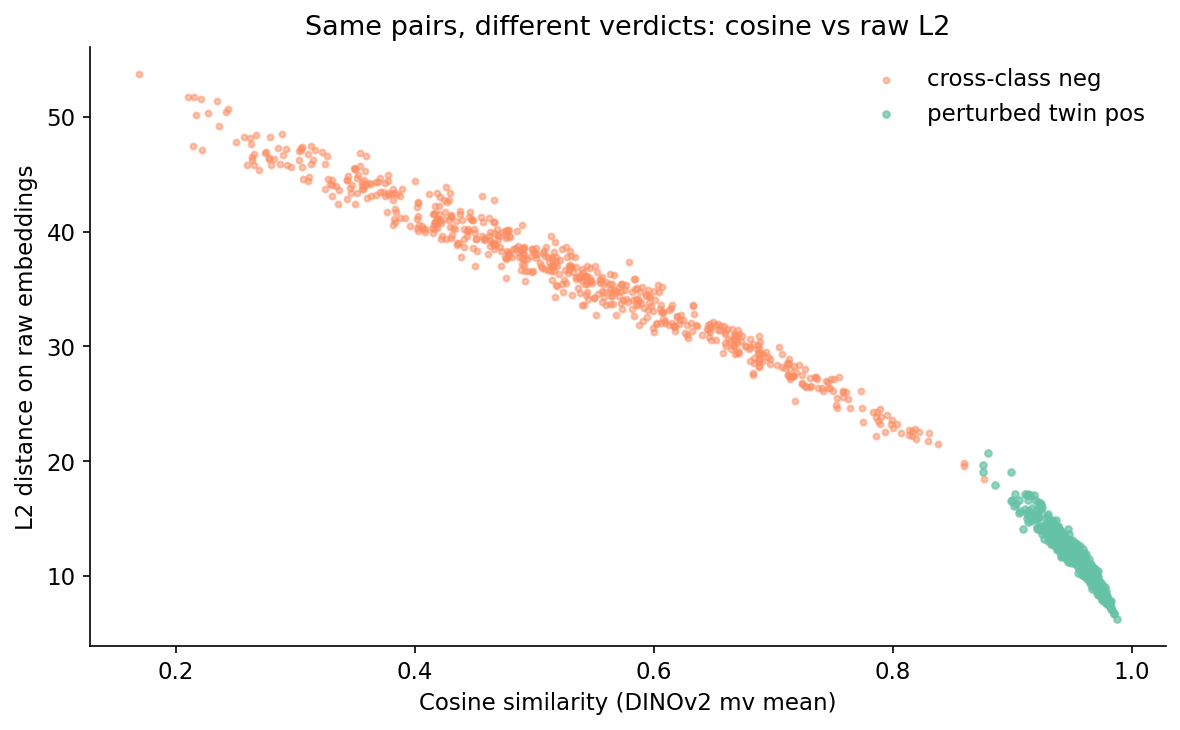
If your pipeline reads "compute the L2 distance between two embeddings and call it a duplicate if it is below X," you have a bug that hides itself perfectly at 50/50. Figure 4 shows why.
The reason cosine sidesteps this is mechanical:
def cosine(a, b):
return np.dot(a, b) / (np.linalg.norm(a) * np.linalg.norm(b))
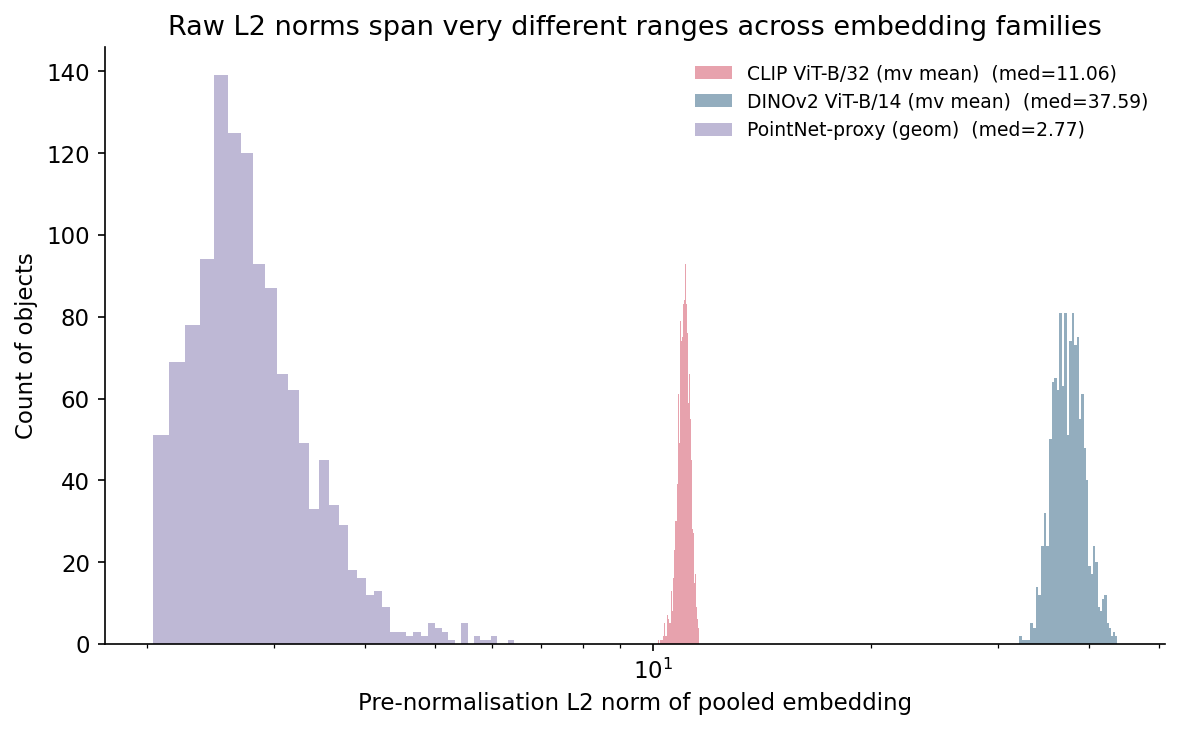
If you switch from cosine to L2 distance on the same embeddings, you are implicitly weighting vectors by their length. Two vectors pointing in the same direction but of different magnitudes will have non-zero L2 distance even though they encode the same direction. The PointNet-proxy's spread of norms (2 to 6) is enough to flip the verdict on borderline pairs.
If you are going to use L2 distance, L2-normalise the embeddings first. Otherwise the threshold you pick will silently track the embedding family's norm distribution and you will re-tune the moment you swap models. Every number below comes from cosine-on-normalised throughout.
I swept thresholds for each (embedding, similarity) on the 50/50 set. The ROC curves are reassuring — DINOv2 hits ROC-AUC 1.000, CLIP 0.997, the PointNet-proxy 0.852.
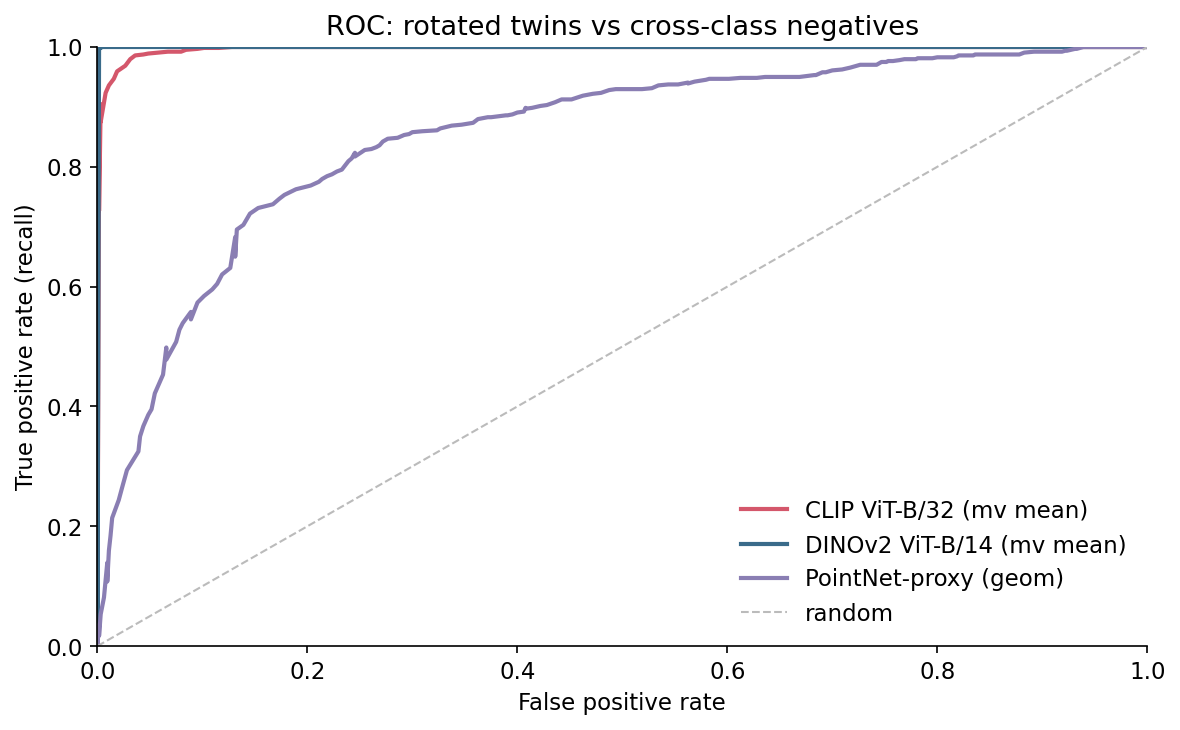
PR tells a less flattering story.
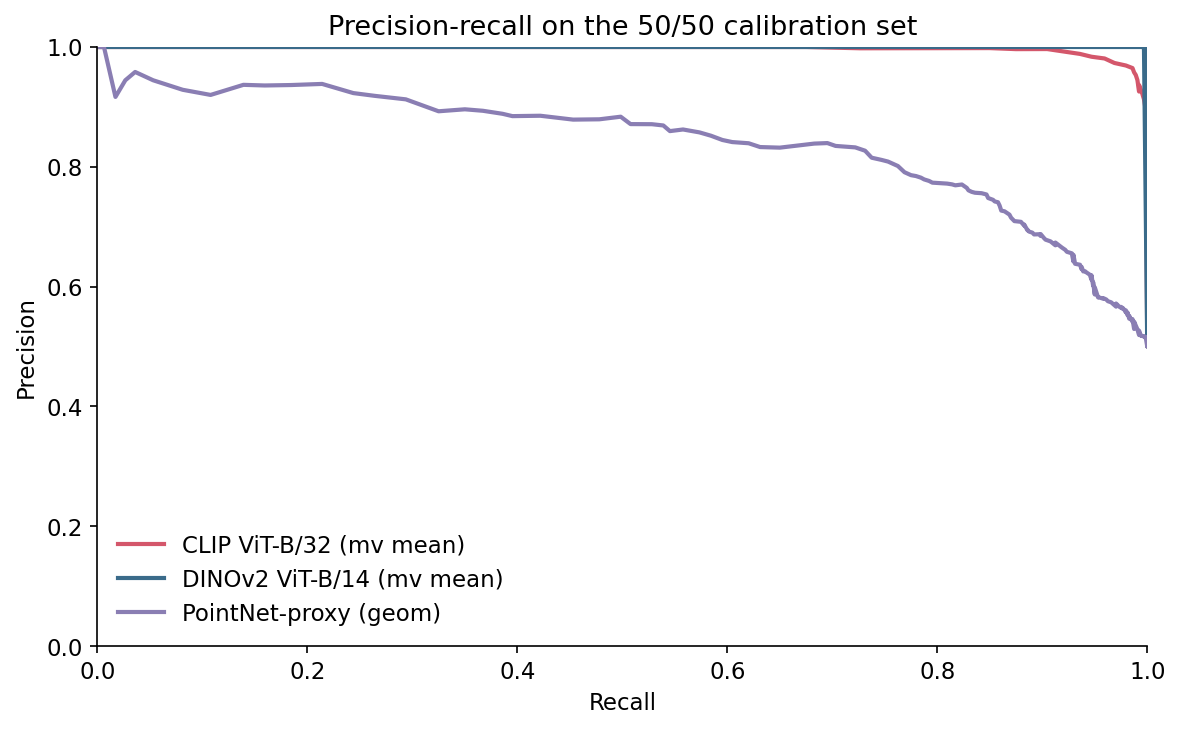
The reason to look at PR and not ROC is direct. ROC uses TPR and FPR, which are conditioned on the true label. They do not move when the base rate moves. Precision is TP / (TP + FP), and as the base rate falls the same FPR generates more FP for every TP. The number you actually report to a stakeholder — "what fraction of items we flag as duplicates really are duplicates" — is precision, and precision is what the base rate eats.
Here is the experiment that makes or breaks the threshold you pick. Hold the encoder, hold cosine similarity, but compute the precision implied by each threshold at four positive base rates: 50%, 20%, 5%, 1%. For each base rate, find the lowest threshold that achieves precision ≥ 0.95 and report the recall you get.
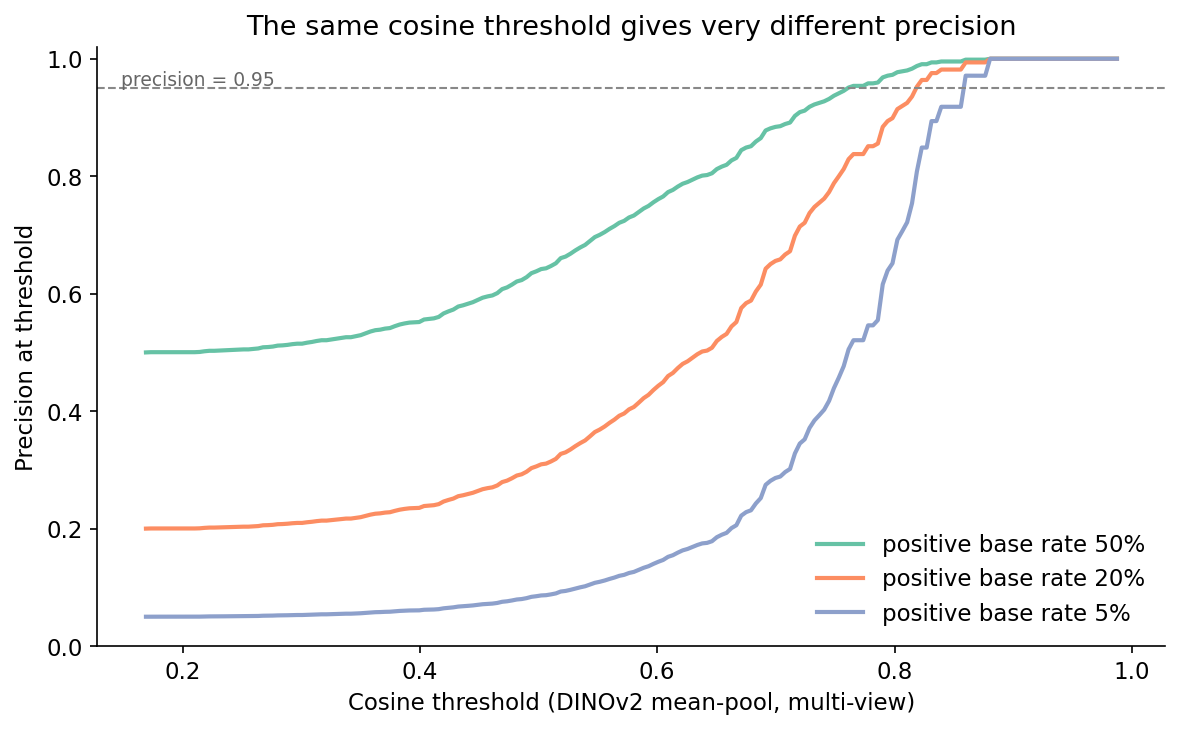
The headline numbers for the encoder you most likely want to ship — CLIP — are in Table 1. Between a 50/50 calibration set and a realistic 5/95 production set, the threshold for the same CLIP encoder, the same cosine metric, and the same precision target shifts from 0.964 to 0.981, and the recall you can achieve at that precision drops from 0.99 to 0.85. At 1/99 the recall falls another 14 points to 0.71.
Table 1. Threshold and recall to hit precision 0.95 at four positive base rates, on cosine similarity over normalised embeddings. Bold marks the baseline 50/50 calibration row per encoder.
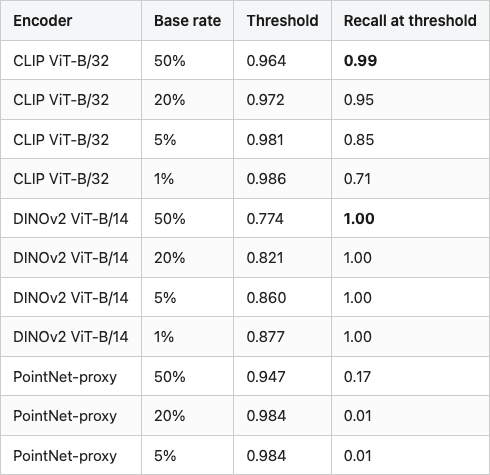
Source: data/threshold-by-base-rate.csv.
Two patterns jump out. DINOv2 holds recall above 0.99 across all four base rates — the encoder is good enough on perturbation pairs that positives and negatives barely overlap, so moving the threshold up only loses a few true positives. CLIP starts in roughly the same place at 50/50 but loses 28 points of recall by the time the base rate hits 1%, because its positive cluster has a soft left tail that bleeds into the high-cosine end of the negative distribution. The PointNet-proxy is the cautionary tale: at any realistic base rate it cannot hold precision 0.95 at usable recall.
This is the part most retrieval tutorials skip and most production teams discover the hard way. If you ship the CLIP 50/50-calibrated cutoff (0.964) into a 5/95 production stream, your realised precision drops well below 0.80 because the negative cluster has a long right tail that the calibration plot under-weighted. The threshold did its calibration job; the base rate moved.
A perturbation-built positive set will not include the cases that actually fool your encoder. To stress-test the threshold, I pulled the 30 highest-scoring true negatives on DINOv2 cosine — these are random cross-class pairs whose embeddings landed close to each other. Six of them in Figure 6.
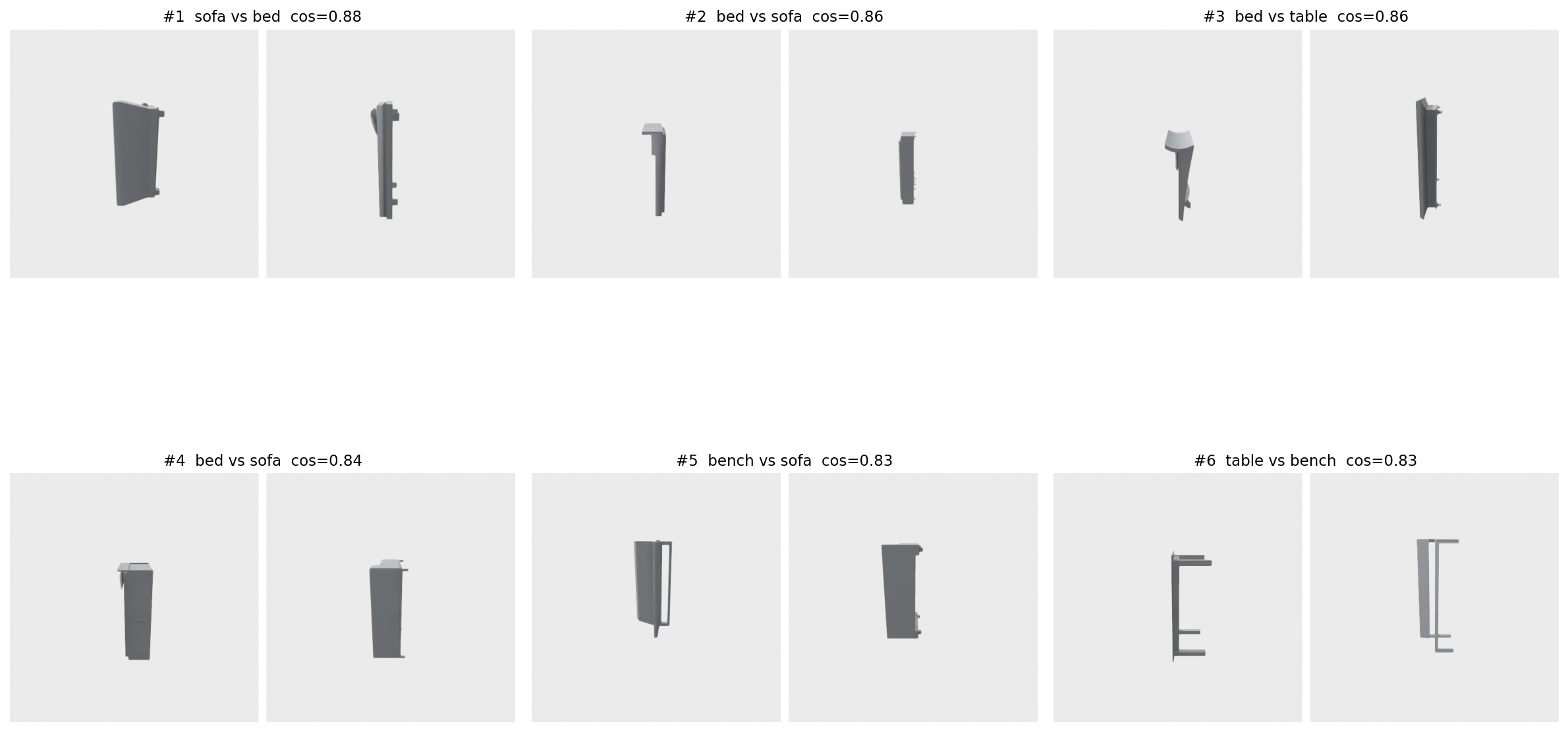
The takeaway is not "DINOv2 is bad." It is that the hardest 1% of true negatives in production will sit far closer to the positive distribution than the calibration set suggests. Two things follow. The 0.95 precision number in Table 1 is an upper bound from the perturbation set; on a production stream with real cross-category lookalikes, expect 5-10 points lower. And the threshold you commit to should be tuned at a precision target higher than your shipping requirement — if you need precision 0.90 in production, calibrate to 0.95 in the perturbation eval and budget 5 points for hard-negative leakage.
Pseudo-positives are easy; pseudo-negatives are also easy unless you actively mine the embedding space for confusing pairs. The hard-negative gallery is the cheapest such mining step — keep the top-30 in a recurring eval bucket and re-check after every encoder swap.
One picture, because it is the most-violated thing in production retrieval. Same scores, same threshold; only the prevalence of positives changes between panel A and panel B.
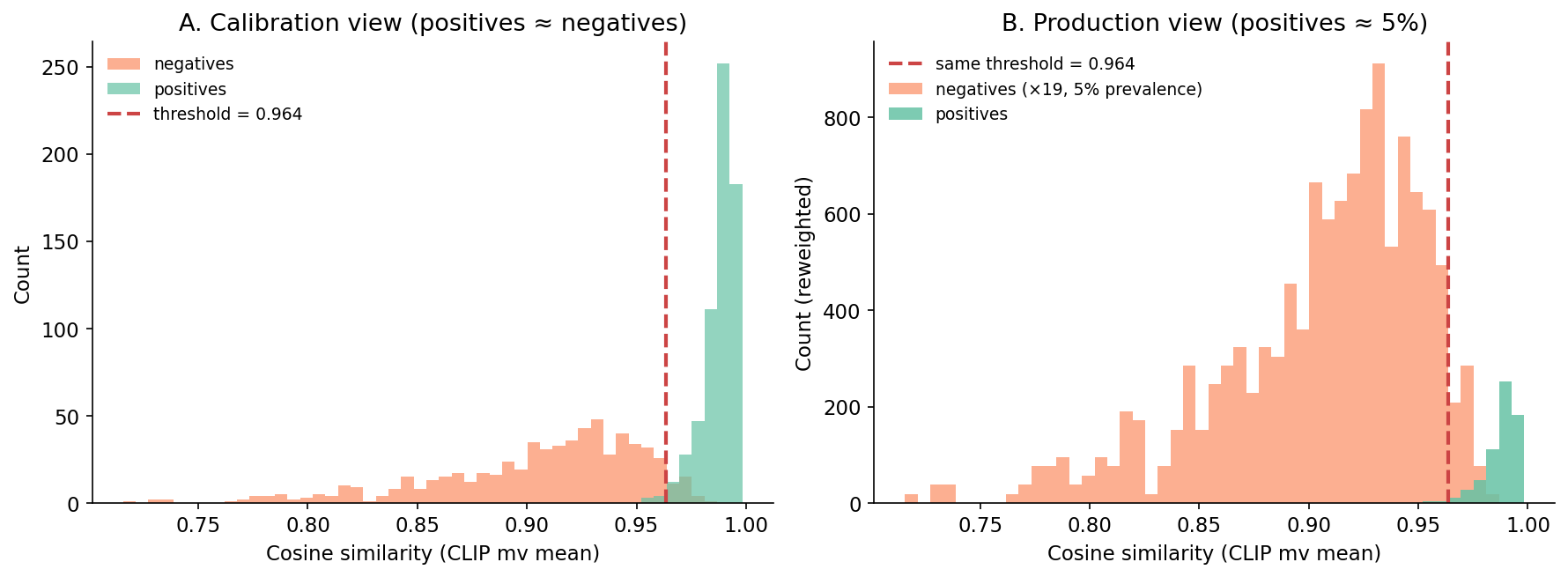
The mistake is staring at panel A and concluding the threshold is correct. Panel B is what production is doing, and the line is in the wrong place.
The cheat sheet asks you to "estimate base rate weekly" but the obvious sampling strategy is wrong. If you sample only items your system flagged as duplicates, you measure precision-at-current-threshold, not base rate. If you sample uniformly at random from the stream, you measure base rate but only if the universe of items has not also shifted — which, in a content catalog with new uploads daily, is also untrue.
The cheapest workable recipe has three parts. First, sample stratified by score band — 50 items each from [0, 0.7), [0.7, 0.9), [0.9, 1.0), 150 per week, then label them. The score band tells you where in the distribution the labelled items live; the labels tell you which items are positive. Then reconstruct prevalence by weighting: multiply each band's positive rate by the share of the production stream that lands in that band; the resulting weighted average is your estimated base rate. And watch the bands directly — if the high-score band's positive rate drops by 10 points week-on-week, your encoder or your data has drifted before any aggregate metric moves.
This avoids the "I only audit my flagged items" trap and gives you the per-band precision you need to recompute the threshold. The labeller does not have to be human if you have a downstream signal — clickthrough, support tickets, user "this is wrong" reports all work as noisy labels for the audit set.
Table 2. What to do for the three setups you will encounter.

Source: synthesized from the experiments above.
The middle row is where most teams sit, and it is the row most retrieval tutorials never name out loud.
The pipeline that survives a base-rate shift is the one in Figure 7. There are three places it goes wrong, and three matching guardrails. The encoder produces vectors of varying magnitudes, so L2-normalise them before any distance is computed. The calibration set is too clean, so mine the top-K hard negatives after every encoder change and add them to your eval bucket. The base rate moves, so sample weekly, recompute the threshold whenever it shifts, and log the threshold value with every prediction so a later analysis can split precision by the threshold in force at the time.
Calibrate the threshold on a perturbation-built pseudo-positive set, then re-pick it whenever the positive base rate changes. Otherwise the "precision-tuned" cutoff you committed to is fiction.
All numbers in this post trace to files in data/:
data/pair-manifest.csv (1,280 rows; 640 pos, 640 neg).data/embeddings-{clip,dinov2,pointnet}-{orig,twin}.npy.data/scores.csv.data/roc.csv. AUC summary: data/auc-summary.csv.data/pr.csv.data/embedding-norms.csv.data/threshold-by-base-rate.csv, data/threshold-vs-precision-baserate.csv.data/hard-negatives.csv.Dataset: ModelNet40 (Wu et al. 2015, CC BY-NC).
Sampling: per class, the first 80 .off files in alphabetical order from the ModelNet40 train/ split. Negative pairs are sampled with numpy.random.default_rng(17) until 640 unique cross-class pairs land. The DINOv2 1% row in Table 1 rounds 0.9955 to 1.00.
Models: openai/clip-vit-base-patch32 (CLIP, MIT-licensed for the released weights) and facebook/dinov2-base (DINOv2, weights under CC BY-NC 4.0 — non-commercial only; swap to a permissively-licensed encoder if you ship). Both pulled via transformers 5.6.1. Mesh ops via trimesh 4.11.5; renders via Open3D 0.19.0 (EGL headless); plots via matplotlib 3.10.8; index ops via faiss-cpu 1.14.1; numerics via numpy 2.2.6, scikit-learn 1.7.2.
Compute: a single Tesla T4 on Lightsail (host lightsail-shapenet, conda env 3d-dedup); renders + embeddings + sweeps in roughly 8 minutes wall-clock for the full 640-object run.
Code: code/main.py (experiment), code/make_visuals.py (figures), code/render_hardnegs.py (hard-negative gallery).
Part 14 of 20 · Back to the series index