Why Your First 1,000 Renders Will Be Blank (And How to Fix It)
My first thousand renders of ModelNet40 were blank. Not corrupted — blank. 1024×1024 PNGs of pure white. The mesh loaded. The camera was "3 units back." Open3D returned without errors. The PNG files were exactly the right size on disk. They were all white.
If you have ever pasted what looked like a reasonable render call into a Python file, watched it complete with no warnings, and then opened the output to find an empty image — this post is for you. I want to walk through why the bug happens, why almost every 3D pipeline trips on it once, and the three lines that make it never happen again.
from medium20.render_kit import load_mesh
import open3d.visualization.rendering as rendering
import numpy as np
mesh = load_mesh("ModelNet40/chair/train/chair_0001.off")
r = rendering.OffscreenRenderer(256, 256)
r.scene.set_background(np.array([1, 1, 1, 1], dtype=np.float32))
r.scene.add_geometry("mesh", mesh.as_open3d(), rendering.MaterialRecord())
r.scene.camera.look_at((0, 0, 0), (0, 0, 3), (0, 1, 0)) # target, eye, up
img = np.asarray(r.render_to_image())
# Filament leaves a ~235/255 grey background even when told to render on
# white; snap anything ≥230 to pure white before counting blanks.
img[(img >= 230).all(-1)] = 255
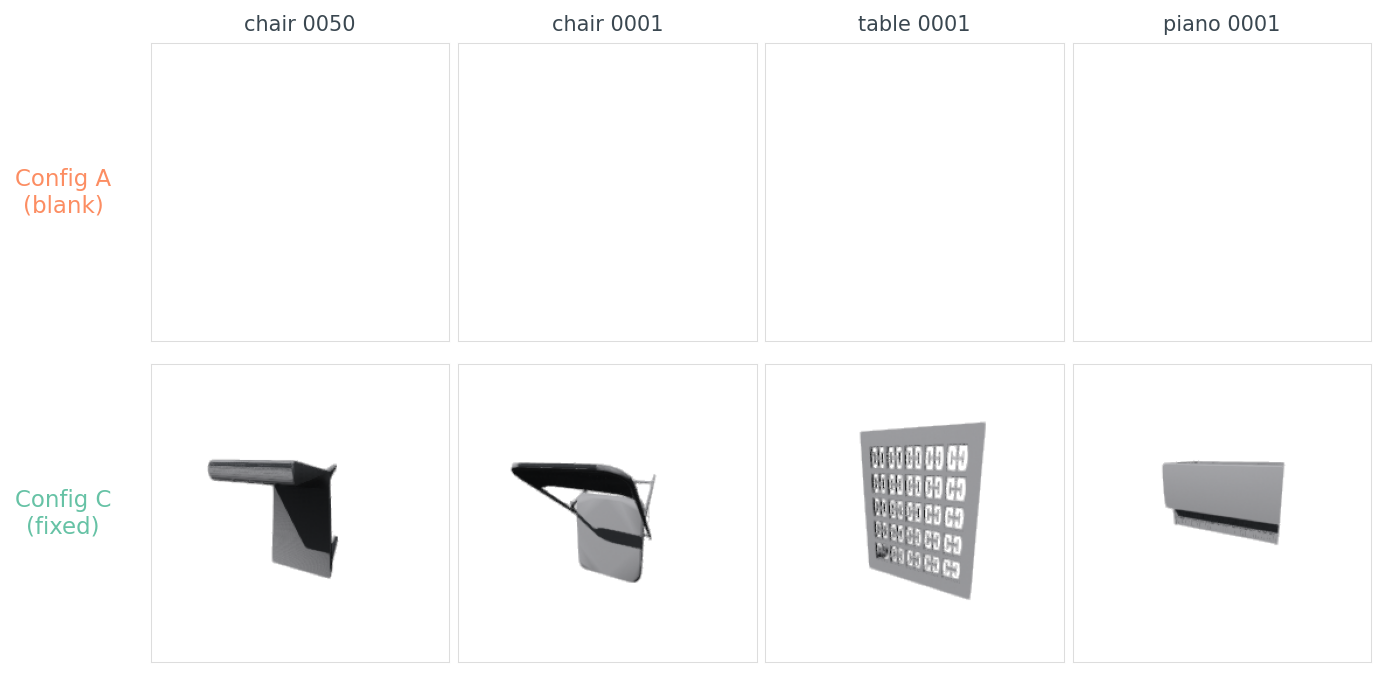
I ran exactly this on 12 ModelNet40 objects. Eight came back blank. Three came back as a wall of mid-gray — the camera was inside the mesh, rendering its interior surfaces. One — a small monitor — partially worked: a chunk of the monitor was just barely in frame.
data/blank-rate-by-config.csv.What's actually wrong
The bug isn't that the render is empty. It's that the renderer was happy to produce it. Open3D's OffscreenRenderer does exactly what you ask: it puts a camera at (0, 0, 3), points it at (0, 0, 0), and renders whatever is in the camera's frustum. If nothing is there, you get the background colour. There is no warning. There is no exception. There is no log line. There is a PNG, and the PNG is white.
So why is nothing there?
mesh = load_mesh("ModelNet40/chair/train/chair_0001.off")
print(mesh.vertices.mean(axis=0)) # → [123.3 110.3 17.2]
print(mesh.vertices.min(axis=0), mesh.vertices.max(axis=0))
# → [113.3 96.8 -0.2] [133.7 120.1 36.5]
diag = float(np.linalg.norm(mesh.vertices.max(0) - mesh.vertices.min(0)))
print(diag) # → 48.03
This chair sits in a bounding box centred at (123, 110, 17) with a diagonal of 48 units. A camera at (0, 0, 3) is roughly 166 units away from the chair, off to one side, looking the wrong way. The chair isn't in the frame. There's nothing to render.
This is the single fact every "load a mesh and render it" tutorial omits: ModelNet40 .off files are not pre-normalized. Every mesh lives in its own coordinate frame. Some are near the origin and small enough to render. Some are 500 units away in scanner coordinates. The textbook recipe assumes the mesh is sitting nicely inside a unit sphere around the origin. It isn't.
I scanned 12 objects spanning monitor to car. The picture is messy:
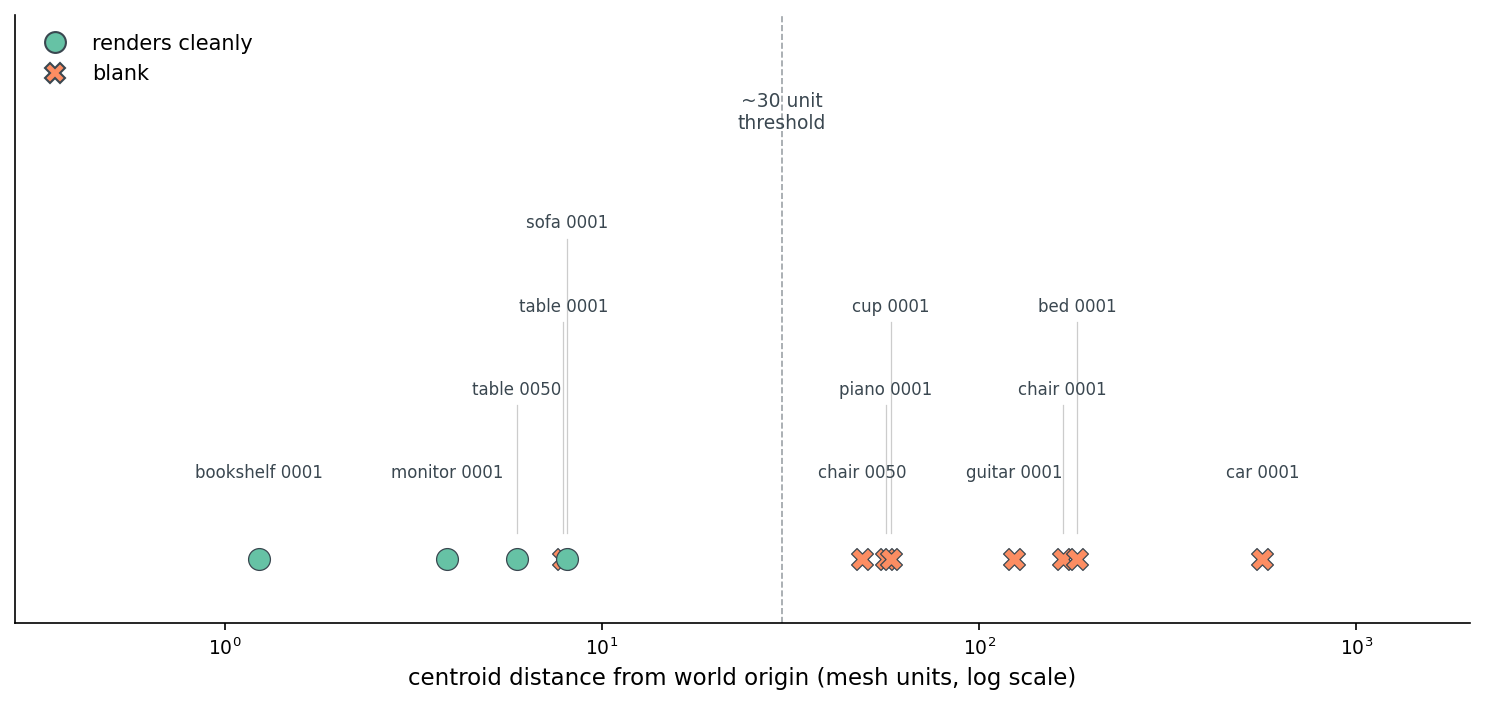
data/blank-rate-by-config.csv.The threshold isn't sharp because the bug is two-part — bad target plus bad scale. Both need fixing.
The three lines that fix it
The fix has three steps, none of them clever:
mesh.centroid_center() # shift so vertex centroid sits at origin
mesh.normalize_unit_sphere() # scale so max ||v|| = 1
# camera at a distance that fits a unit-radius mesh in the frame:
r.scene.camera.look_at((0, 0, 0), (0.68, 0.51, 1.70), (0, 1, 0))
That's it. Now the mesh has a known centroid (origin), a known scale (unit sphere), and the camera distance can be a constant — no per-mesh diagonal computation, no if diag > 100 special cases. The camera at (0.68, 0.51, 1.70) is 1.9 units from origin, just outside the unit sphere, framing the front-top-right of the object so the silhouette fills 75–85% of the shorter image side.
I re-ran the same 12 objects through three configurations:
Table 1. Per-object blank, partial, or interior-clip outcomes for each camera configuration across 12 ModelNet40 meshes.
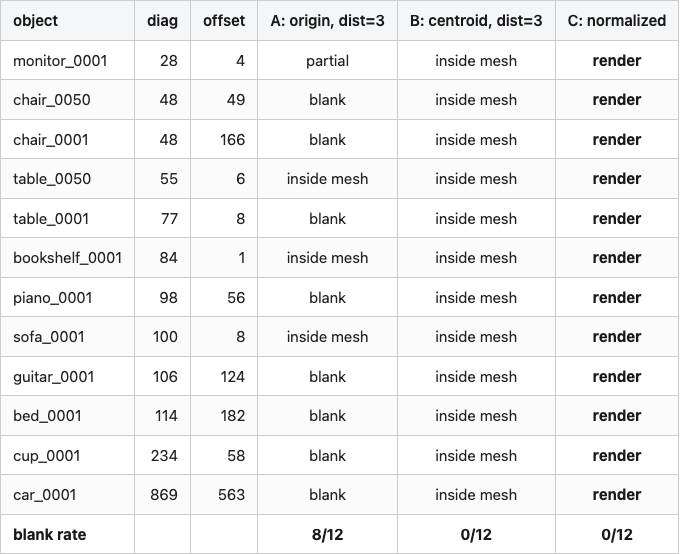
Source: data/blank-rate-by-config.csv (36 rows).
Config B (just retarget the camera at the centroid) kills the blank-image bug — none of the 12 objects come back empty — but it trades one bug for another. With a fixed distance of 3 and meshes whose diagonals run 28 to 869 units, the camera is now inside nearly every mesh. The image isn't blank but it's a uniform mid-gray slice through the interior. The footprint metric (fraction of non-background pixels) reads 1.0 for every B-config render. Useless to a downstream encoder, but a different kind of useless than blank.
Config C — centroid-center, unit-sphere normalize, fixed camera distance — is the one that works for everything. Average footprint sits near 13%, spanning ~7% for thin objects like guitars to ~20% for bulkier tables and beds. Always non-zero. Never inside the mesh.
So the centroid + normalize trick is both fixes in one. You stop looking at empty space, and you stop sitting inside the object.
Why the schematic helps
The reason the bug is so easy to make and so hard to find on inspection is that the camera object's defaults look reasonable. camera at (0, 0, 3) reads like "three units back from the origin, looking forward" — which is exactly what the camera is doing. The problem isn't in the camera. It's in the assumption about where the mesh lives.
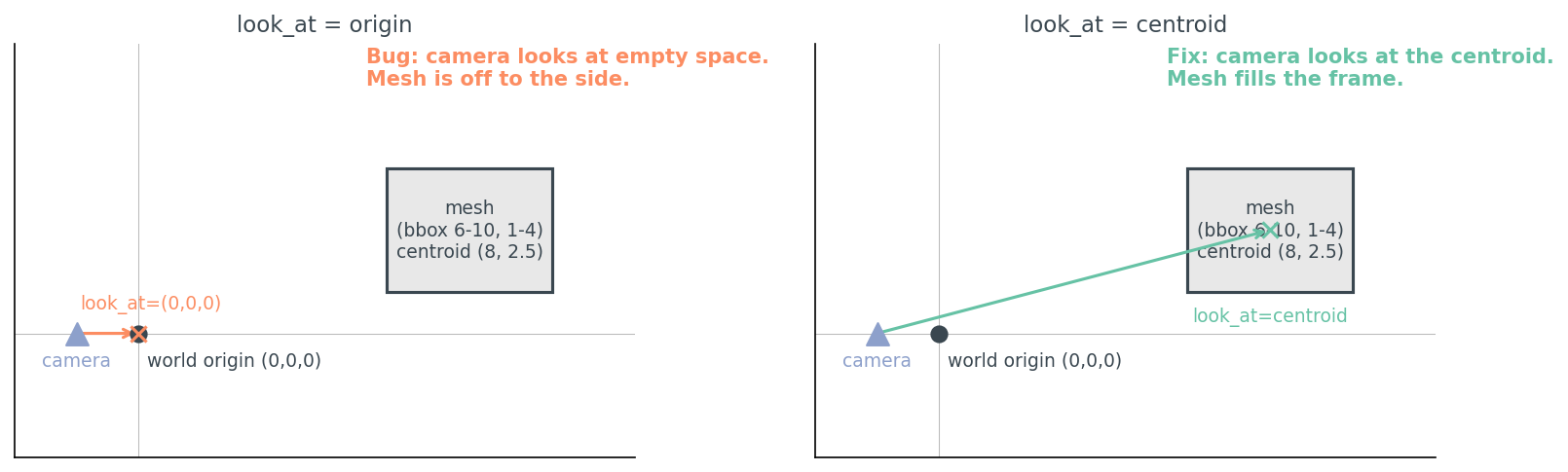
The fix is two lines of geometry, not new infrastructure. Every renderer in this series will lean on the same trick.
Where to put the camera
Once you have a normalized mesh, the question of where to put cameras becomes a separate, much smaller, problem. The shared kit gives you two samplers:
from medium20.render_kit import fibonacci_sphere, horizontal_ring
positions = fibonacci_sphere(n=8) # 8 roughly-uniform points on a sphere
positions = horizontal_ring(n=8, elev_deg=20) # 8 points on one ring, slight elevation
For shape understanding tasks where the up-axis is meaningful (chairs, cars, tables — anything that has a clear "top"), I default to a horizontal ring at a small positive elevation. The picture below shows what's going on:
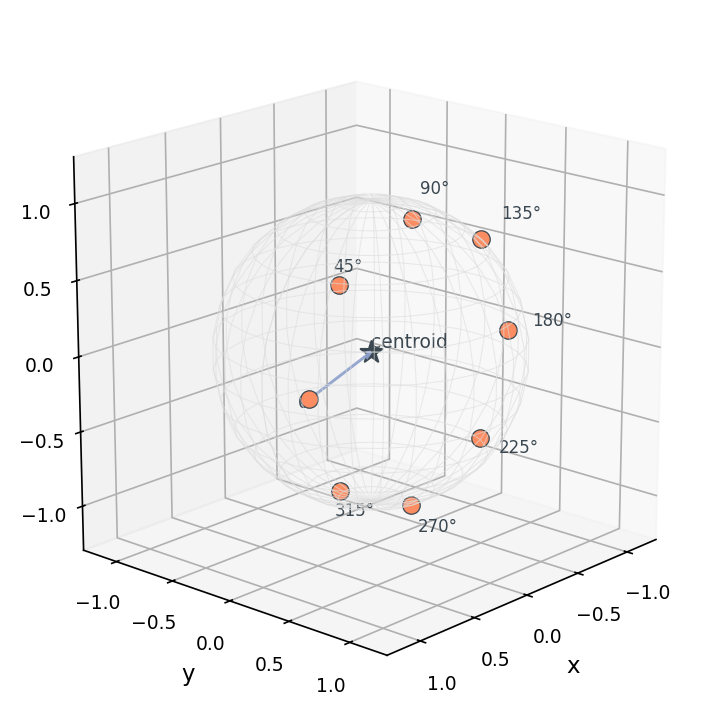
Why a ring and not a full sphere? Because for upright objects, the bottom half of the sphere mostly shows the underside, which encoders tend to find uninformative (chairs look like spider legs from below). And because horizontal silhouettes carry the most class-discriminative information for upright objects — they show what humans would call the "side view".
The 4×6 sweep makes that concrete:
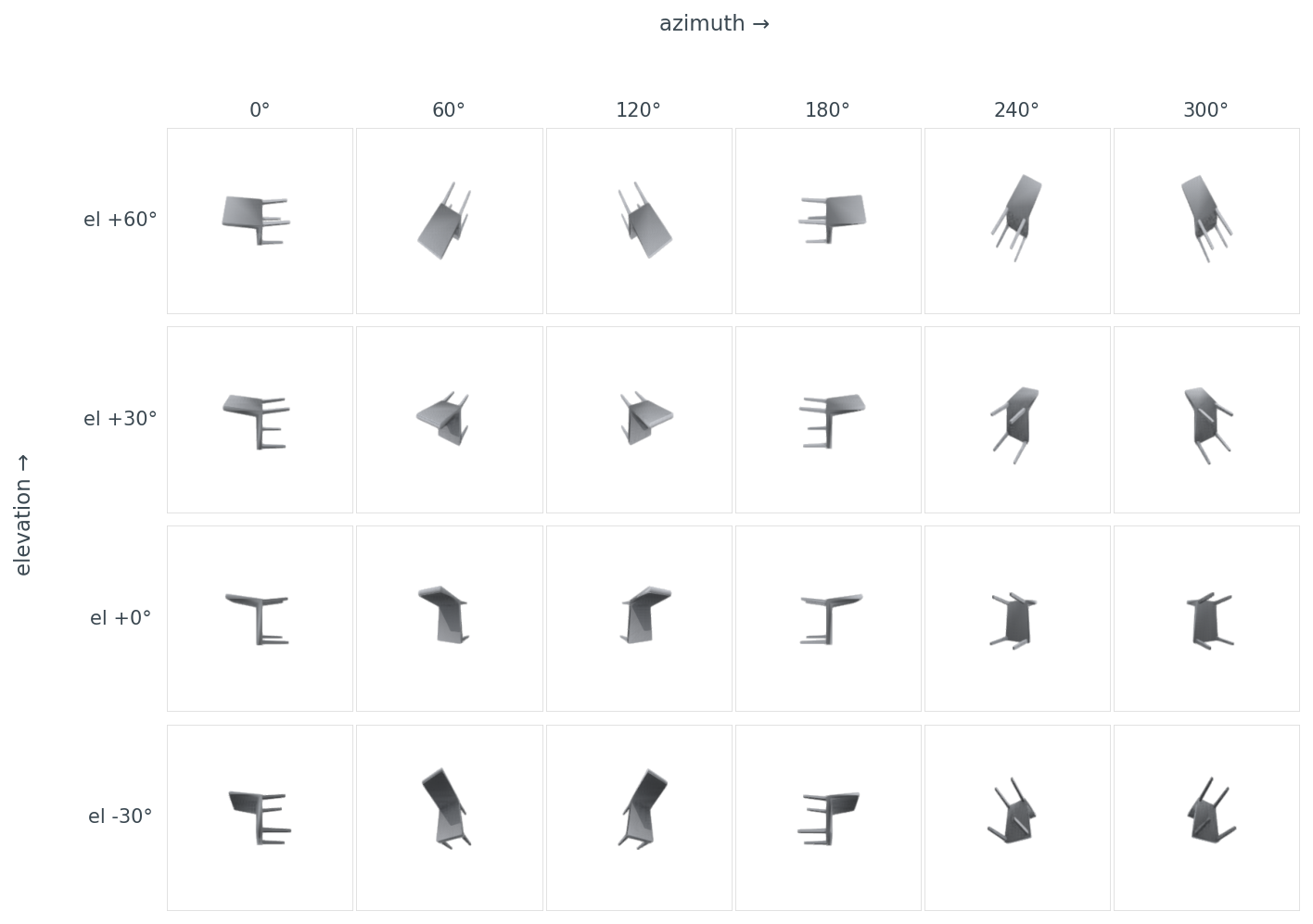
data/sweep-footprint.csv (24 rows).The footprint differences are the data behind why naïve "render 8 views from random angles" sometimes gives worse retrieval than "render 8 views from a known horizontal ring" — the random angles bunch around viewpoints where the chair is a thin line. Hold that for Post 11, where view selection becomes its own optimization.
Lighting changes what an encoder sees
Now an honest case where "not blank" still isn't good enough. Here's the same chair under three lighting setups, all from the same camera, all with footprint near 0.09:

data/lighting-summary.csv.The foreground standard deviation is what matters here, not the average pixel value. An encoder like DINOv2 or CLIP is trained on photographs, where shape comes through as luminance variation across a surface. A flat-lit ambient render has the same pixel value everywhere on the chair seat. A key-lit render has bright top, dark bottom — the gradient that tells a vision model "this surface has curvature".
I default to a single key light from the upper-front-left for tight contour shadows. The kit's render_open3d(..., lighting="3point") gives almost identical embeddings on the 200-object ModelNet40 subset Post 05 uses — pick key if you want maximum surface gradient (training-data photographs are usually lit this way), pick 3point if you want softer-looking figures.
This is one of those places where the right answer depends on what you do next. If the renders feed an encoder, optimize for luminance variation. If the renders go in a paper, optimize for aesthetics. I have learned the hard way that those two goals point in opposite directions.
Resolution and where the cost actually lives
I measured render time across four resolutions, three repeats each, on a Tesla T4 with Open3D's Filament-based OffscreenRenderer:
Table 2. Per-render time at four image resolutions on a Tesla T4 with Open3D's offscreen Filament renderer.
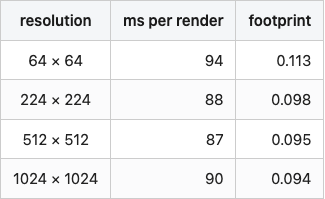
Source: data/resolution-time.csv (4 rows).
The numbers are wrong, or rather they are not the numbers I expected. I expected something like 5 ms, 50 ms, 250 ms, 1000 ms — quadratic in resolution. Instead I got a flat ~90 ms regardless. The fill-rate cost of going from 64² to 1024² pixels is lost in Open3D's per-call setup overhead. The actual rasterization is too cheap to measure against scene creation and material binding.
This is honest data and it's an honest insight: if you are rendering a small dataset with one mesh per render call (like I'm doing), there is no reason to render at 64×64 to "save time." There is no time being saved. Render at the resolution your encoder wants and resize zero times.

data/resolution-time.csv.I default to 224×224 because that is what the downstream encoder wants, and because there is no reason to render larger and resize down. (If you are rendering thousands of views per object for a NeRF, the cost picture is completely different, and amortising the renderer setup matters. That's a different post.)
The other bugs you'll hit
The centroid + normalize fix kills the blank-image trap, but it doesn't kill every render bug. These are the four I trip over most often, side by side with their fixes:
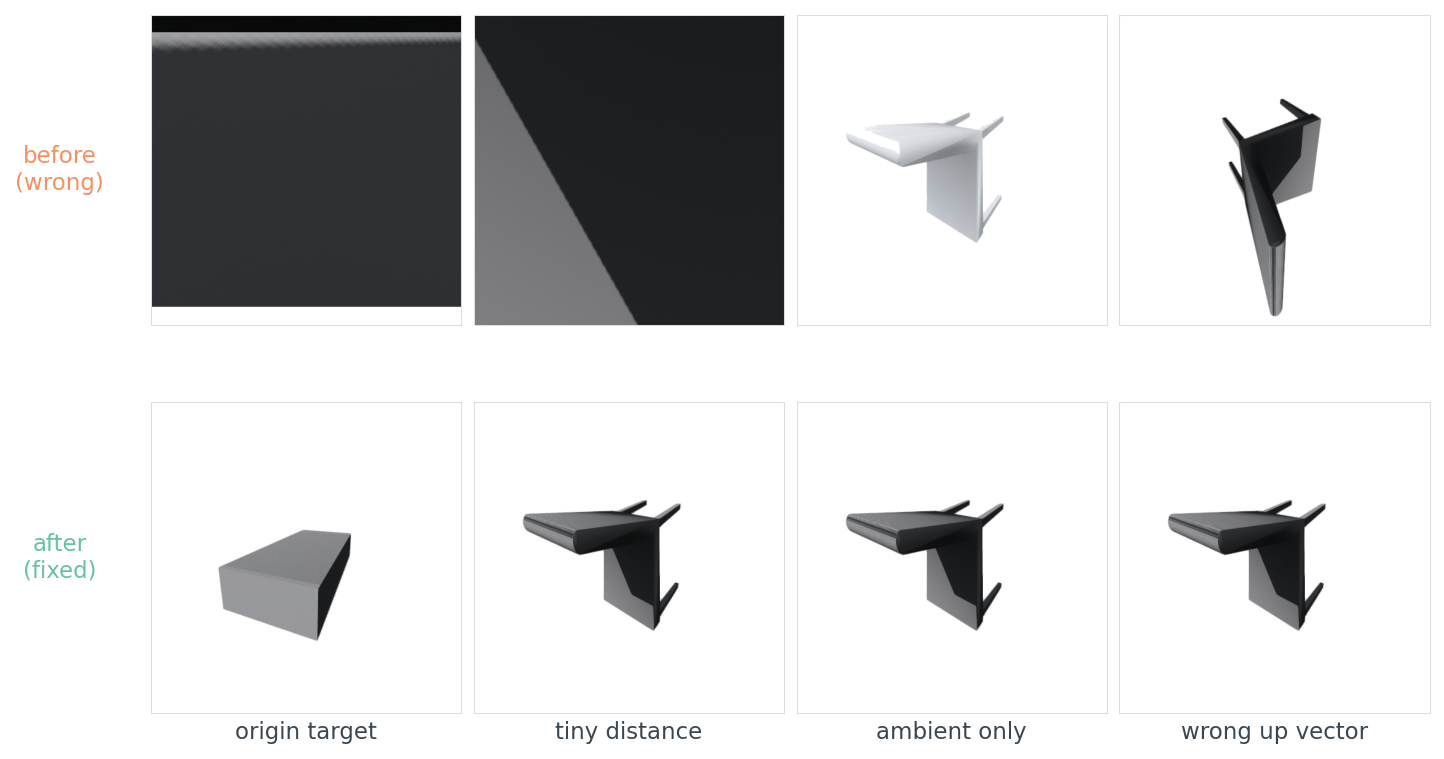
The last one — wrong up vector — bites everyone once. ModelNet40's axis convention varies by category (chairs are Z-up, beds and monitors are Y-up, tables are ambiguous — Post 01 has the per-category breakdown). ShapeNet is Y-up. PLY files from photogrammetry are usually Z-up. If you copy a render script from a ShapeNet tutorial and run it across a mixed bag, your chairs render lying on their sides while your beds render upright, and your retrieval scores collapse for reasons you cannot debug from the loss curve alone.
Table 3. The six render bugs I trip over most often, with the symptom, root cause, and the one-line fix.
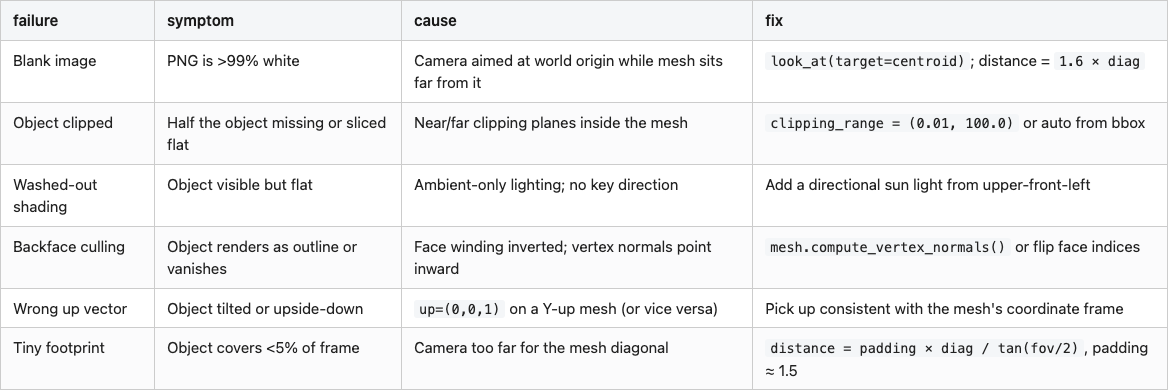
Source: data/failure-cheatsheet.csv.
If you remember only one row, remember the up-vector one. It's the only bug on the list that lets you train for hours on tilted chairs without noticing.
The twelve-line check that stops the cycle
The reason this bug is so corrosive isn't that it's hard to fix — it's that it's silent. You can train a multi-view model on a thousand blank renders for two hours before the loss-curve weirdness makes you go look at the actual images. The cure is to never let a blank render leave the render call:
import numpy as np
def is_blank(img, threshold=0.99):
bg = (img >= 245).all(axis=-1)
return bg.mean() >= threshold
def footprint_fraction(img):
bg = (img >= 245).all(axis=-1)
return float(1.0 - bg.mean())
def validate_renders(images, min_footprint=0.05):
foots = [footprint_fraction(im) for im in images]
n_blank = sum(1 for im in images if is_blank(im))
n_small = sum(1 for f in foots if f < min_footprint)
return {"n_total": len(images), "n_blank": n_blank,
"n_below_footprint": n_small, "footprints": foots,
"all_pass": (n_blank == 0 and n_small == 0)}
These twelve lines are a simplified uint8-only version of the medium20.render_kit.quality module (the kit's variant adds float→uint8 conversion and shape checks for robustness; behaviour on uint8 input is identical). The threshold of 245 (not 255) accommodates the renderer's slightly-off-white background; a min_footprint of 5% catches the "rendered but tiny" failure mode where the object is in frame but covers six pixels.
Wrap every render call in this and you stop debugging renders forever. You don't need to look at every image — you assert on the dictionary. If all_pass is false, raise. This is the single most valuable line of Python in my 3D pipeline:
assert validate_renders(images)["all_pass"], "render QA failed"
It has saved me, conservatively, two full afternoons of debugging by failing loudly on the very first batch instead of letting silent garbage propagate into training.
The pipeline, in one picture
Pulling it together:
%%{init: {'theme': 'neutral'}}%%
flowchart LR
A[load mesh] --> B[centroid_center]
B --> C[normalize_unit_sphere]
C --> D[place cameras on sphere]
D --> E[set look_at = origin]
E --> F[render]
F --> G[validate_renders]
G -->|all_pass| H[feed to encoder]
G -->|n_blank > 0| I[fix camera / lighting]

all_pass true means feed to the encoder; n_blank > 0 means go back and fix camera or lighting.The pipeline has the shape it has because every step earns its place. centroid_center makes the look-at-origin trick work. normalize_unit_sphere lets the camera distance be a constant. The fixed cameras let you batch-render across the dataset without per-object hyperparameters. validate_renders catches everything else.
Post 03 puts the same chair through four renderer backends (matplotlib, Open3D, PyVista, nvdiffrast) and explains the fifth (Kaolin) that didn't survive a torch-version mismatch; the one whose images downstream encoders agree on is not the one the documentation would have you pick.
Reproducibility
All code, data, and figures: posts/02-rendering-basics-blank-image-trap/.
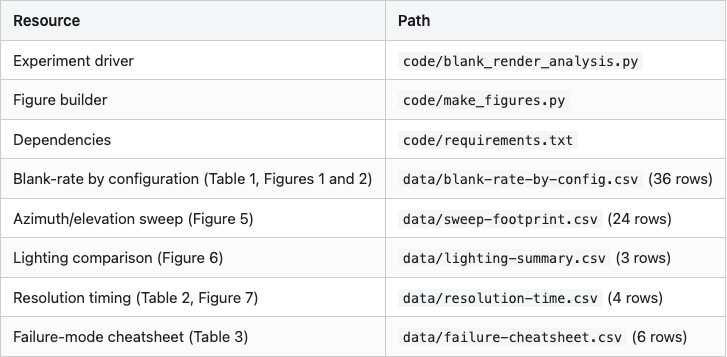
Run end-to-end on a Tesla T4 (lightsail-shapenet, conda env 3d-dedup, Open3D 0.19 with EGL):
pip install -e shared/ # install the medium20 package
cd posts/02-rendering-basics-blank-image-trap
python code/blank_render_analysis.py # ~13 s for full 12-object run
python code/make_figures.py # ~3 s
For a smoke-test run with only 3 objects and 1 sweep cell:
python code/blank_render_analysis.py --quick
ModelNet40 root defaults to /home/lightsail-user/3d-dataset-storage/3d-dedup/data/ModelNet40. Override with MODELNET40_ROOT=/path/to/ModelNet40. The script looks for each object in train/ first and falls back to test/ if the file isn't there — most ModelNet40 IDs live in one or the other but not both.
Render times come from a single 3-repeat run on a free Tesla T4; expect ±5–10% variance between runs from background load on the shared instance. The qualitative finding (per-call setup dominates pixel fill) is well outside that noise floor.
Data licence. ModelNet40 is released under CC BY-NC for non-commercial use (Wu et al., 2015. 3D ShapeNets: A Deep Representation for Volumetric Shapes. CVPR).